Nos hemos encargado de la preparación de este mini 6.5 para la Minitransat y otras regatas de la categoría. El mini 6.5 Vektor es un diseño de Etienne Bertrand y se fabrica en los astilleros de Yatch Service en Polonia.
El velero llegó vacío a la FNOB, como vemos en esta comparativa antes/después.

El equipamiento es prácticamente todo de NKE exceptuando GPS, VHF y actuador del piloto que son Furuno, Icom y Raymarine respectivamente.
La preparación es parecida a la hecha en otro Vektor el Kristina II, aunque esta vez la instalación es completa desde zero. Hemos fabricado el armario eléctrico con todos los elementos (interruptores, fusibles térmicos rearmables, …). También hemos cableado todos los elementos eléctricos y electrónicos entre si desde zero.
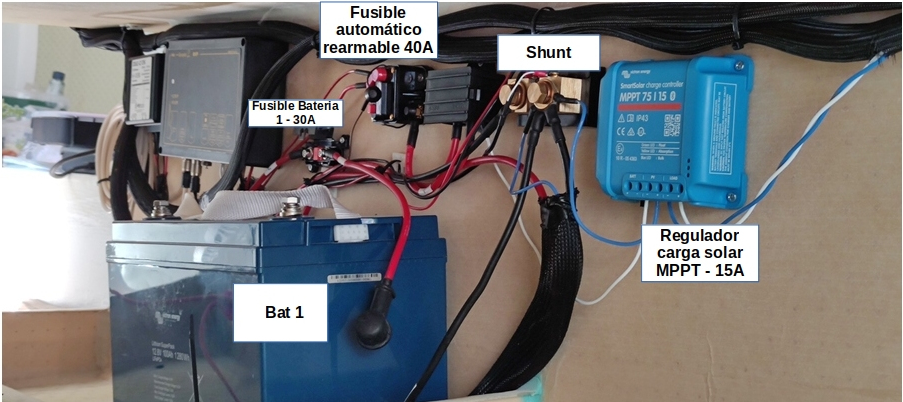
Aquí vemos el armario general con sus interruptores/fusibles rearmables etiquetados (a la derecha). A la izquierda los interruptores de selección del piloto automático (autopilot principal o el auxiliar de caña) junto con dos enchufes de 12v USB y mechero. En el medio el cableado interior. Todos los terminales son con faston de 6,3mm, y recubiertos con termoretractil con adhesivo interno de silicona. Los terminales del concentrador de negativos, son de anilla, también protegidos con termoretractil.

En este tipo de veleros de regata transoceánica, es importante llevar algunos elementos por duplicado. Por ejemplo, y muy importante, es el caso del piloto automático. Ya que en travesías en solitario no puede fallar o faltar este equipamiento. Por eso tenemos la doble selección de piloto a la izquierda.
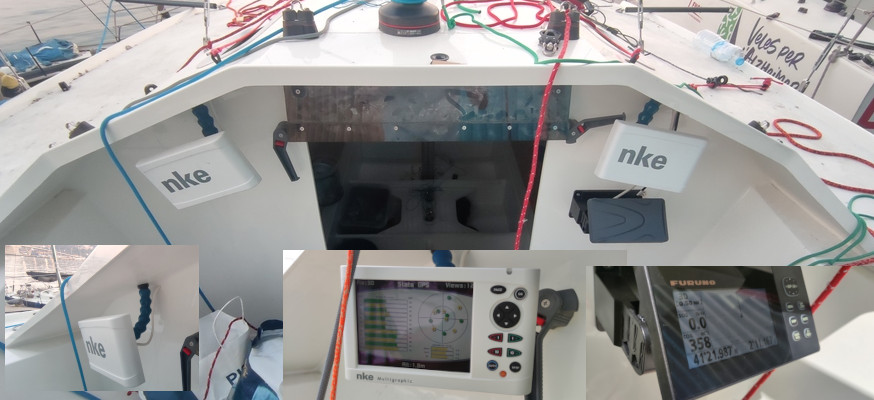
En la bañera, vemos los dos monitores de NKE (uno actuando de master), la fijación con accesorios para tuberias de agua (los azules) y el GPS de Furuno en marcha.
Por la parte de popa estribor, instalamos las antenas del GPS Furuno y del equipo NKE.

En el mástil instalamos equipo de viento, antena VHF y luz de navegación. Pasamos todos los cables dentro de una funda trenzada.

La instalación quedará como se ve aquí abajo: 2 baterias de Litio, y los elementos básicos:


Todos los cables fuera del armario eléctrico general, se han construido a partir de terminales remachados, o faston, y luego soldadura con estaño en el extremo y cerrados con funda termoretractil con adhesivo interno de silicona. Es la forma de asegurar la estanqueidad en un ambiente tan y tan húmedo y sometido a rociones de agua en algunos casos durante la navegación de altura.

En la siguiente imagen vemos los elementos ya instalados básicos del equipo NKE y las cajas de conexiones del bus. Todos los elementos, incluido AIS, gps, corredera, sonda,etc.. van conectados al bus de NKE para la integración del sistema y el gobierno del velero con el piloto automático, etc. Por esto, tenemos 4 cajas de conexiones de NKE distribuidas por el velero. Los cables, que normalmente son muy largos los hemos mantenido con sobrante para posibles cambios durante la preparación y primeras navegaciones del Mini 6.5.

Aquí abajo vemos por ejemplo, las cajas que conectan los monitores exteriores con el Gyropilot 2(computadora del piloto) y otros elementos. Los cables en el interior de las cajas con extremos soldados para protección y facilitar el connexionado, y con pequeñas bridas de sujeción para que no salgan. Los sobrantes de cable, en su momento podrán ser eliminados.

Aquí otra caja del bus, en la parte central del velero, ya cerrada y estanca. Los cables que llegan a todas las cajas los marcamos para facilitar al armador la identificación en caso de algun problema durante la navegación.

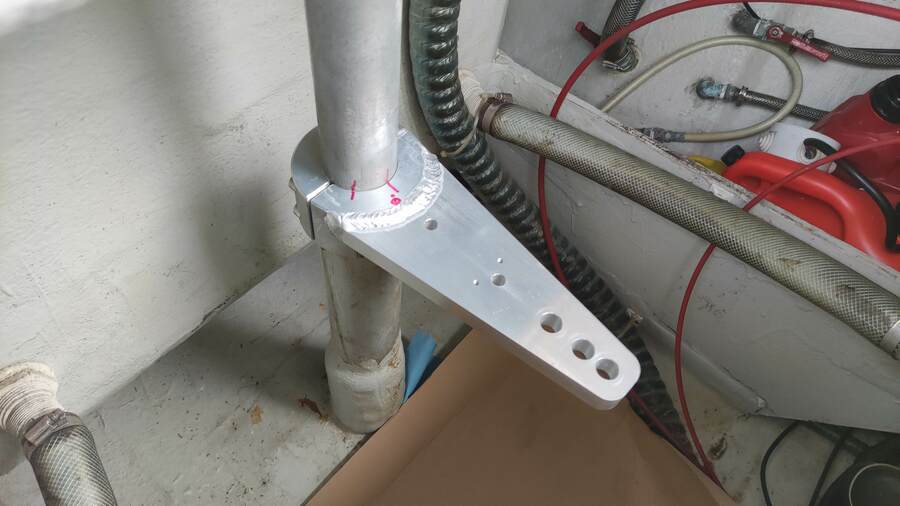
Este es el piloto automático de Raymarine conectado al sistema NKE. El piloto se une al eje de la caña que mueve los 2 timones.

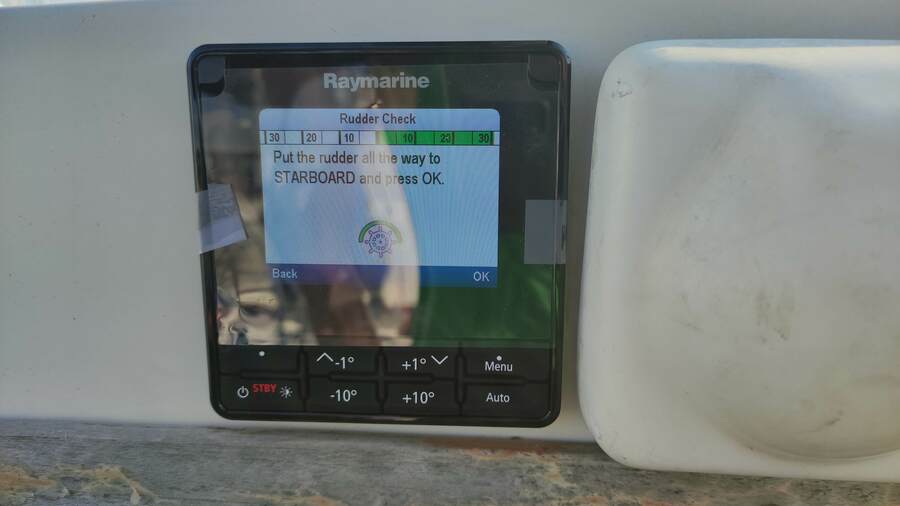
Una vez está todo instalado, hay que configurar todo el sistema NKE, dar de alta el número MMSI en radio VHF y AIS. Configurar el piloto, etc… Y a navegar. Eso si, siempre habrá cambios y mejoras a hacer durante la preparación en las primeras regatas…